Какая то неопределенная конструкция.
Столько гораздо точных решений.
Например, даже снимать не какое-то определённое положение, а само движение.
Началось движение - сработать.
Тогда можно бросать его. А сопло через щуп в 0.02 мм упирать в стол.
А в работе он будет втягиваться ваше сопла.
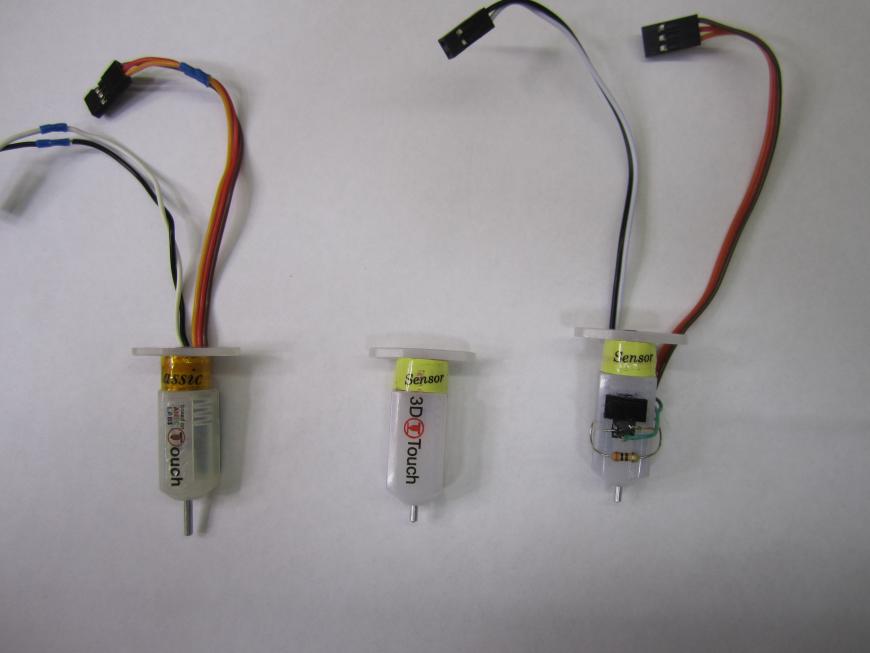
то, что вы описываете, это другой тип датчика. бл работает по оптическому принципу. он срабатывает в определенном положении каждый раз (положение одно и то же, но оно не зависит от того, начальная это точка, или средняя по длине шупа). есть еще индуктивные. есть еще электронные (замыкание цепи), есть еще на датчиках холла датчики и т.д. они все по разному работают и для 3д принтера для калибровки стола подходят только на датчиках холла помимо оптических, но у них есть свои минусы, например они вообще не работают в термокамере. потому что от температуры показания сильно плавают