



DV
Size: a a a
2021 May 25

МК
МК
Апертурой же!
МК
П...шь как Троцкий
V
Не, у меня не такая, чтобы в шагах мерять.
V
Оппоненты троцкого не меньшими пиздунами были.
МК
V
Хохловейдер. Не от хохол🙂
EZ
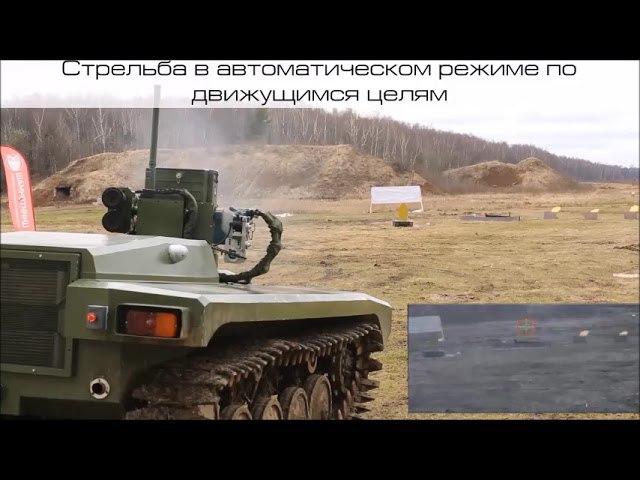
Ватфор вдумчиво посмотрел на демонстрацию прототипа «Маркер» и делится наблюдениями.
В стрельбовых упражнениях мы видим неплохую работу стабилизации и системы управления огнём, что больше всего заметно в последнем отрезке: очередь в заданный контур не только стреляет, но ещё и попадает, а наведение не сбивается. При огне по целям это тоже заметно, но не столь выпукло.
О качестве автономного выбора цели судить сложно, в демонстрации все цели «учебные», контрастные и ярко раскрашены. Алгоритм действия похож на выбор объекта, больше всего похожего на цель, обстрел, и так далее, пока цели не закончатся. Зато о системе машинного зрения, отвечающей за восприятие глубины, можно сказать, что она неплохо справляется со своими обязанностями, потому что орудие наводится достаточно точно даже на цели, движущиеся на хоть небольших, но достаточно разных расстояниях. Для большего впечатления хотелось бы посмотреть на работу по более удалённым целям и стрельбу в движении.
При выполнении движения в автоматическом режиме самое интересное снизу справа: это мир, как его воспринимает машина. В первую очередь там видны артефакты работы системы ориентации (для специалистов — SLAM), но не совсем понятно, что являлось основой для карты. Если сам робот (или летающий дрон) её построил в процессе движения, то это очень и очень неплохо, но недостаточно деталей, чтобы говорить об этом с уверенностью.
По ходовой части можно сказать только, что она есть и едет вполне шустро. Движение по относительно ровному полигону на гусеницах и соответствующая система управления — не самая сложная часть обязательной программы, поэтому тут более интересна надёжность механической, а не электронной части, движение по пересечённой местности и в более сложных сценариях. Помнится, к «Уранам» там возникали вопросы.
В целом очень неплохая демонстрация, пожелаем ей эволюционировать в уже серийные изделия.
В стрельбовых упражнениях мы видим неплохую работу стабилизации и системы управления огнём, что больше всего заметно в последнем отрезке: очередь в заданный контур не только стреляет, но ещё и попадает, а наведение не сбивается. При огне по целям это тоже заметно, но не столь выпукло.
О качестве автономного выбора цели судить сложно, в демонстрации все цели «учебные», контрастные и ярко раскрашены. Алгоритм действия похож на выбор объекта, больше всего похожего на цель, обстрел, и так далее, пока цели не закончатся. Зато о системе машинного зрения, отвечающей за восприятие глубины, можно сказать, что она неплохо справляется со своими обязанностями, потому что орудие наводится достаточно точно даже на цели, движущиеся на хоть небольших, но достаточно разных расстояниях. Для большего впечатления хотелось бы посмотреть на работу по более удалённым целям и стрельбу в движении.
При выполнении движения в автоматическом режиме самое интересное снизу справа: это мир, как его воспринимает машина. В первую очередь там видны артефакты работы системы ориентации (для специалистов — SLAM), но не совсем понятно, что являлось основой для карты. Если сам робот (или летающий дрон) её построил в процессе движения, то это очень и очень неплохо, но недостаточно деталей, чтобы говорить об этом с уверенностью.
По ходовой части можно сказать только, что она есть и едет вполне шустро. Движение по относительно ровному полигону на гусеницах и соответствующая система управления — не самая сложная часть обязательной программы, поэтому тут более интересна надёжность механической, а не электронной части, движение по пересечённой местности и в более сложных сценариях. Помнится, к «Уранам» там возникали вопросы.
В целом очень неплохая демонстрация, пожелаем ей эволюционировать в уже серийные изделия.
A
Я тебе этим еще прошлый раз тыкал, пока ты тут изображал #онижедети
A
Совершенно зря не под классическую хохлому: золотой-красный-черный.
ML
Фино-угорский арнамент, посконный.
ВС
У нашего ГУБОПа, оказывается, есть свой телеграм-канал, случайно на него наткнулся, глянул — а дофига, оказывается, задерживают протестовавших. Но большинство предупреждение получают и на камеру они потом обещают, что больше так не будут. Вот, что значит я не отслеживаю активно провластное, даже не был в курсах.
A
Речь не о том, что посконнее, а какой стиль лучше выразит характер героя 😉
DV

Ой. Не фейк. КНДР предостерегает от полетов через Беларусь.
EZ
акк левый
DV
Take a look at DPRK News Service (@DPRK_News): https://twitter.com/DPRK_News?s=09
DV
DV
Но Казахстан реально отменил полеты
DV
