Как Ingenuity оценивает движение.
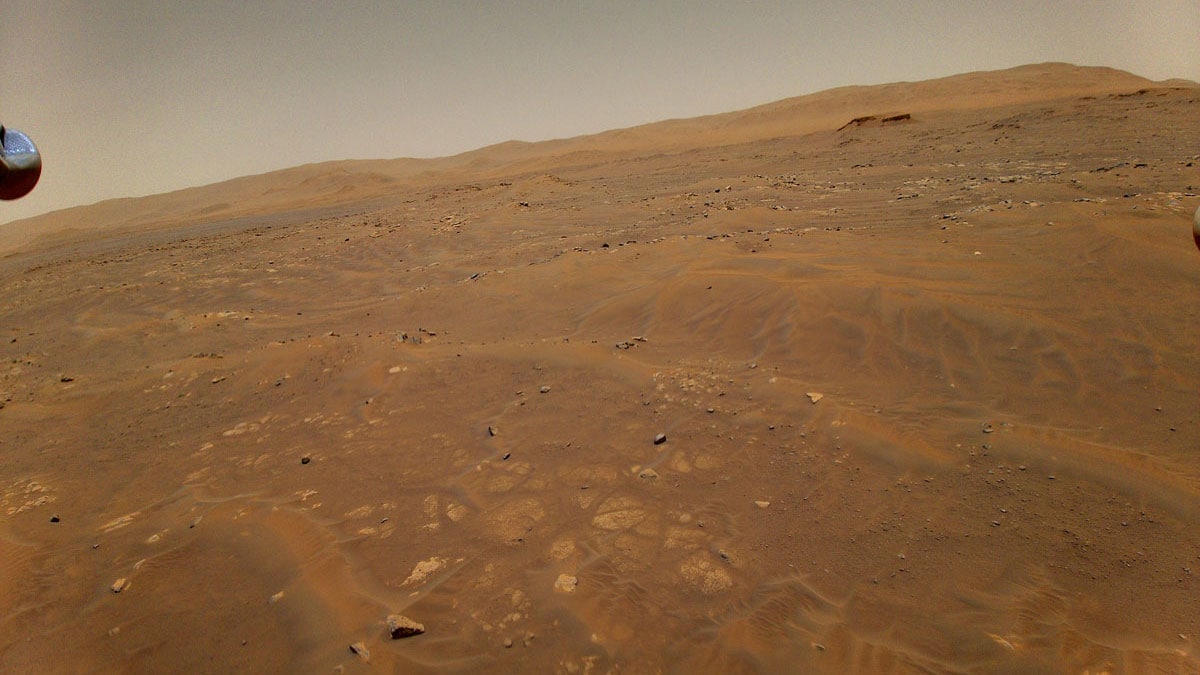
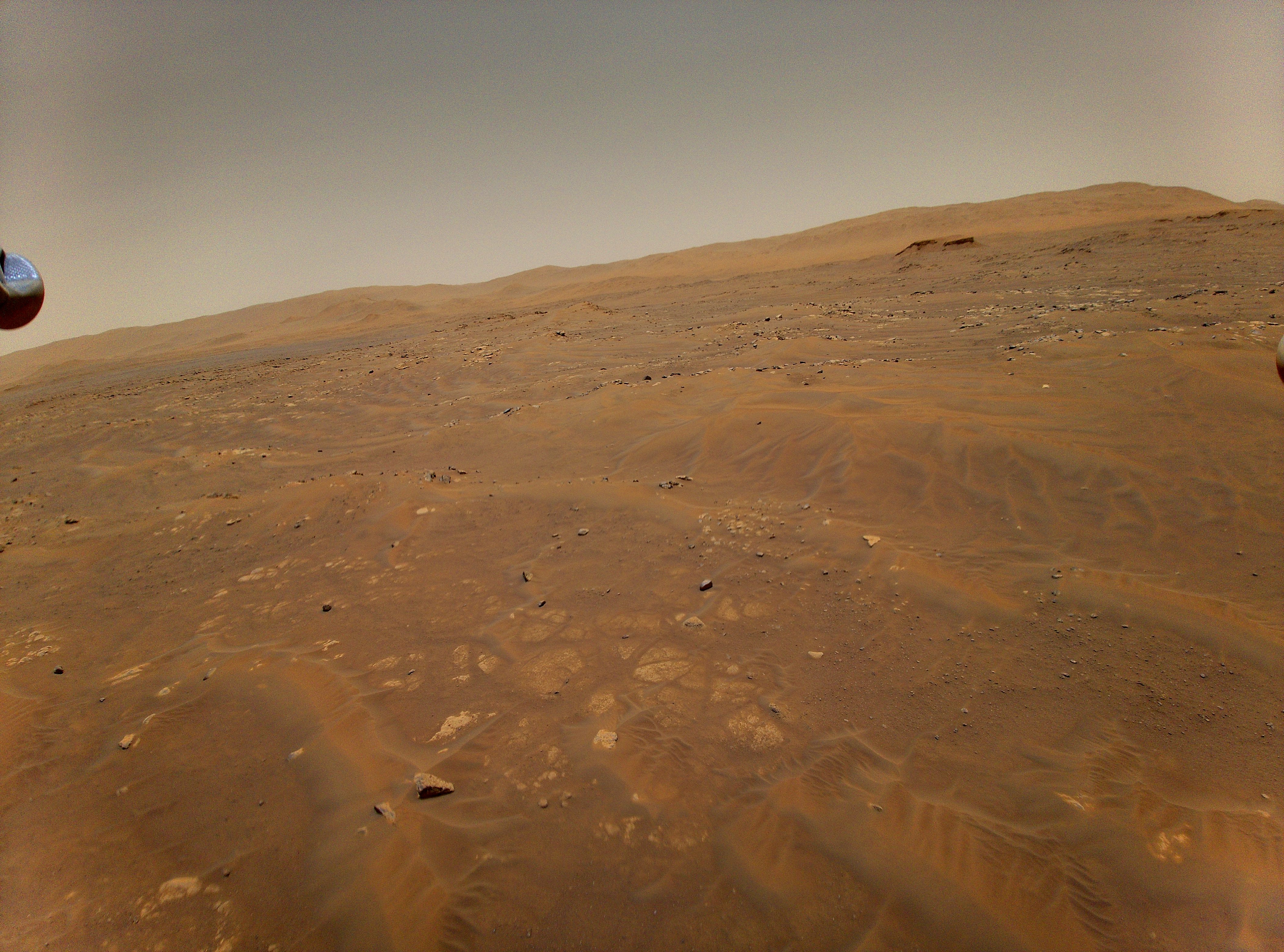
Находясь в воздухе, Ingenuity отслеживает свое движение с помощью бортового инерциального измерительного блока (IMU). IMU измеряет ускорение и скорость вращения. Интегрируя эту информацию с течением времени, можно оценить положение, скорость и ориентацию вертолета (где он находится, с какой скоростью он движется и как ориентирован в пространстве). Бортовая система управления реагирует на предполагаемые движения, быстро изменяя управляющие сигналы (со скоростью 500 раз в секунду). Если бы навигационная система полагалась только на IMU, она не была бы очень точной в долгосрочной перспективе: ошибки быстро накапливались бы, и вертолет в конечном итоге сбился бы с пути. Чтобы поддерживать лучшую точность с течением времени, оценки на основе IMU номинально корректируются на регулярной основе, и именно здесь на помощь приходит навигационная камера Ingenuity. Большую часть времени в воздухе навигационная камера, направленная вниз, делает 30 снимков марсианской земли в секунду и сразу же подает их в навигационную систему вертолета. Каждый раз, когда появляется изображение, алгоритм навигационной системы выполняет ряд действий: во-первых, он проверяет метку времени, которую получает вместе с изображением, чтобы определить, когда было сделано изображение. Затем алгоритм делает прогноз о том, что камера должна была видеть в этот конкретный момент времени, с точки зрения особенностей поверхности, полученные по предыдущим изображениям, сделанным за несколько минут до этого (обычно это цветовые вариации, такие как камни и рябь на песке). Наконец, алгоритм смотрит, где на самом деле эти особенности появляются на изображении. Алгоритм навигации использует разницу между прогнозируемым и фактическим местоположением этих объектов для корректировки оценок положения, скорости и ориентации.