


N
Size: a a a
2021 May 28

ON
Во це я розумію інфографіка !
M[
инфо есть, графики нет 🤷♂️
A
Надо было в бинарном коде кидать)
2021 May 29
M[
вторая серия (вернее присказка) 🤣
M[
Что мы узнали об управлении полетом и аэродинамических характеристиках Ingenuity.
Перед каждым испытательным полетом Ingenuity, мы загружаем в него инструкции, которые точно описывают, как должен выглядеть полет. Но когда приходит время летать, вертолет работает сам по себе и полагается на набор алгоритмов управления полетом, которые мы разработали здесь, на Земле, еще до того, как Ingenuity был запущен на Марс.
Чтобы разработать эти алгоритмы, мы провели детальное компьютерное моделирование, чтобы понять, как вертолет будет вести себя в марсианской среде. После этого мы провели испытания в вакуумной камере высотой 25 метров и диаметром 7.5 метров, в лаборатории реактивного движения, где воспроизвели атмосферу Марса. Но во всей этой работе мы могли только приблизиться к определенным аспектам окружающей среды. Теперь, когда Ingenuity действительно летает на Марсе, мы можем начать оценивать, насколько все складывается в соответствии с ожиданиями. Вот некоторые ключевые аспекты работы системы управления полетом на Марсе.
Перед каждым испытательным полетом Ingenuity, мы загружаем в него инструкции, которые точно описывают, как должен выглядеть полет. Но когда приходит время летать, вертолет работает сам по себе и полагается на набор алгоритмов управления полетом, которые мы разработали здесь, на Земле, еще до того, как Ingenuity был запущен на Марс.
Чтобы разработать эти алгоритмы, мы провели детальное компьютерное моделирование, чтобы понять, как вертолет будет вести себя в марсианской среде. После этого мы провели испытания в вакуумной камере высотой 25 метров и диаметром 7.5 метров, в лаборатории реактивного движения, где воспроизвели атмосферу Марса. Но во всей этой работе мы могли только приблизиться к определенным аспектам окружающей среды. Теперь, когда Ingenuity действительно летает на Марсе, мы можем начать оценивать, насколько все складывается в соответствии с ожиданиями. Вот некоторые ключевые аспекты работы системы управления полетом на Марсе.
M[
Взлёт.
В отличие от многих потребительских дронов, Ingenuity не управляется изменением скорости вращения ротора. Вместо этого мы управляем нашим марсианским вертолётом таким же образом, как управляются полномасштабные наземные вертолеты: изменяя угол наклона лопастей, который влияет на «угол атаки» профиля и тем самым определяет, насколько хорошо лопасти цепляются за воздух. Чем больше угол, тем больше создается подъемная сила (и сопротивление). Как и в случае с традиционным вертолетом, мы можем изменить угол наклона двумя способами: с помощью «общего управления», которое изменяет шаг лопастей равномерно по всему вращению лопасти, и с помощью «циклического управления», при котором лопасть наклоняется вверх с одной стороны аппарата и вниз с другой.
Когда Ingenuity взлетает, ротор уже вращается с заданной скоростью 2537 об/мин. Мы взлетаем с резким увеличением «общего» управления обоими роторами, что заставляет аппарат отрываться от земли. Во время этой начальной фазы взлета мы ограничиваем систему управления реагированием только на угловые скорости (скорость вращения или наклона вертолета). Положение горизонта при этом не учитывается, иначе это могло бы привести к неопределенному поведению. Начальная фаза взлета длится всего доли секунды и как только вертолет наберет высоту всего 5 сантиметров, система получает полный контроль над положением, скоростью и ориентацией вертолета. На данный момент мы ускоряемся до скорости вертикального набора высоты 1 метр в секунду. Чтобы оценить наши движения во время полета, мы используем набор датчиков, включающий лазерный дальномер (для измерения высоты) и камеру. Мы не используем эти датчики, пока не достигнем 1 метра над «уровнем моря», из опасения, что они могут быть закрыты пылью у земли. Вместо этого мы изначально полагаемся только на инерциальный измерительный блок (IMU), который измеряет ускорение и угловую скорость, мы интегрируем эти измерения для оценки наших движений. Это своего рода навигация с «точным расчетом» и сравнима с измерением того, как далеко вы прошли, путем подсчета шагов. В долгосрочной перспективе это не очень точно, но поскольку Ingenuity требуется всего пара секунд, чтобы достичь 1 метра, этот принцип работает.
Одна из вещей, которые нам были интересны, это то, насколько «уверенно» Ingenuity поднимется над землей и достигнет первого порога в 5 см. Данные первых трех полетов показывают, что часть набора высоты заняла около 0.25 секунды, что точно соответствует ожиданиям и указывает на то, что у Ingenuity не было проблем с созданием достаточной тяги при взлете. Во время этого начального разгона мы ожидали увидеть скачок мощности, необходимой для роторной системы, и мы его наблюдали. Например, скачок во втором полёте составил около 310 Вт, что значительно ниже возможностей наших батарей, которые могут выдерживать скачки до 510 Вт.
После взлета Ingenuity потребовалось около 2 секунд, чтобы достичь высоты 1 метр, на которой он мог бы начать использовать полный набор датчиков. При этом, хотя мы действительно видели небольшую пыль на изображениях, сделанных марсоходом Perseverance (припаркованным поблизости) во время взлета, не было никаких признаков того, что летящая пыль или песок закрывали высотомер или камеру, так что, наш слишком «осторожный» дизайн был ошибкой (и это хорошо).
В тот момент, когда ноги вертолета отрываются от земли, на его движение начинает влиять ветер. Эти ветры могут привести к тому, что аппарат на мгновение сдвинется (влево / право или вперед / назад) при взлете, пока не включится система контроля положения относительно земли. Мы были готовы к значительным углам крена / тангажа при взлете, если бы ветер был сильным у земли, но на трех взлетах Ingenuity они были ограничены лишь парой градусов, что обеспечивает хороший вертикальный взлет.
В отличие от многих потребительских дронов, Ingenuity не управляется изменением скорости вращения ротора. Вместо этого мы управляем нашим марсианским вертолётом таким же образом, как управляются полномасштабные наземные вертолеты: изменяя угол наклона лопастей, который влияет на «угол атаки» профиля и тем самым определяет, насколько хорошо лопасти цепляются за воздух. Чем больше угол, тем больше создается подъемная сила (и сопротивление). Как и в случае с традиционным вертолетом, мы можем изменить угол наклона двумя способами: с помощью «общего управления», которое изменяет шаг лопастей равномерно по всему вращению лопасти, и с помощью «циклического управления», при котором лопасть наклоняется вверх с одной стороны аппарата и вниз с другой.
Когда Ingenuity взлетает, ротор уже вращается с заданной скоростью 2537 об/мин. Мы взлетаем с резким увеличением «общего» управления обоими роторами, что заставляет аппарат отрываться от земли. Во время этой начальной фазы взлета мы ограничиваем систему управления реагированием только на угловые скорости (скорость вращения или наклона вертолета). Положение горизонта при этом не учитывается, иначе это могло бы привести к неопределенному поведению. Начальная фаза взлета длится всего доли секунды и как только вертолет наберет высоту всего 5 сантиметров, система получает полный контроль над положением, скоростью и ориентацией вертолета. На данный момент мы ускоряемся до скорости вертикального набора высоты 1 метр в секунду. Чтобы оценить наши движения во время полета, мы используем набор датчиков, включающий лазерный дальномер (для измерения высоты) и камеру. Мы не используем эти датчики, пока не достигнем 1 метра над «уровнем моря», из опасения, что они могут быть закрыты пылью у земли. Вместо этого мы изначально полагаемся только на инерциальный измерительный блок (IMU), который измеряет ускорение и угловую скорость, мы интегрируем эти измерения для оценки наших движений. Это своего рода навигация с «точным расчетом» и сравнима с измерением того, как далеко вы прошли, путем подсчета шагов. В долгосрочной перспективе это не очень точно, но поскольку Ingenuity требуется всего пара секунд, чтобы достичь 1 метра, этот принцип работает.
Одна из вещей, которые нам были интересны, это то, насколько «уверенно» Ingenuity поднимется над землей и достигнет первого порога в 5 см. Данные первых трех полетов показывают, что часть набора высоты заняла около 0.25 секунды, что точно соответствует ожиданиям и указывает на то, что у Ingenuity не было проблем с созданием достаточной тяги при взлете. Во время этого начального разгона мы ожидали увидеть скачок мощности, необходимой для роторной системы, и мы его наблюдали. Например, скачок во втором полёте составил около 310 Вт, что значительно ниже возможностей наших батарей, которые могут выдерживать скачки до 510 Вт.
После взлета Ingenuity потребовалось около 2 секунд, чтобы достичь высоты 1 метр, на которой он мог бы начать использовать полный набор датчиков. При этом, хотя мы действительно видели небольшую пыль на изображениях, сделанных марсоходом Perseverance (припаркованным поблизости) во время взлета, не было никаких признаков того, что летящая пыль или песок закрывали высотомер или камеру, так что, наш слишком «осторожный» дизайн был ошибкой (и это хорошо).
В тот момент, когда ноги вертолета отрываются от земли, на его движение начинает влиять ветер. Эти ветры могут привести к тому, что аппарат на мгновение сдвинется (влево / право или вперед / назад) при взлете, пока не включится система контроля положения относительно земли. Мы были готовы к значительным углам крена / тангажа при взлете, если бы ветер был сильным у земли, но на трех взлетах Ingenuity они были ограничены лишь парой градусов, что обеспечивает хороший вертикальный взлет.
M[
Зависание.
На фазах зависания мы пытаемся поддерживать постоянную высоту, курс и положение. При оценке того, насколько хорошо нам удается этого добиться, мы вынуждены по большей части полагаться на собственные оценки Ingenuity того, что он делал, поскольку количество данных для установления «истины» у нас ограниченно. Эти оценки подвержены ошибкам в навигации, о которых будет рассказано в отдельном посте. Но стабильность этих оценок говорит нам о том, насколько точно контроллер может удерживать требуемые значения. Данные показывают, что мы очень хорошо удерживаем высоту в режиме зависания, примерно с точностью до 1 см. Мы также удерживаем курс (в заданном направлении) с точностью менее 1.5 градусов. Для горизонтального положения мы наблюдали смещения примерно до 25 см. Такие колебания ожидаются в результате порывов ветра.
А какой был ветер во время наших полетов? К счастью для нас, марсоход Perseverance имеет метеостанцию MEDA. Для первого полёта у нас есть измерения от MEDA, указывающие на скорость ветра 4-6 метров в секунду с востока и юго-востока в течение большей части полета с порывами до 8 метров в секунду. Имейте в виду, что эти измерения производятся на высоте 1.5 метра над уровнем земли, и существует тенденция к усилению ветра по мере того, как вы поднимаетесь с уровня земли вверх. У нас также есть измерения плотности атмосферы во время первого полета, показывающие 0.0165 килограмма на кубический метр, или около 1.3% плотности атмосферы Земли на уровне моря. Используя эту информацию, мы можем оценить производительность системы в другом важном аспекте, а именно, в требованиях к управлению, необходимых для полета.
Что касается «общего» управления (это то, которое равномерно изменяет угол наклона лопастей несущего винта, чтобы повлиять на тягу вертолета), мы хотели бы видеть значения зависания, примерно соответствующие нашим ожиданиям. Во время первого полета мы зависали с углом около 9.2 градуса на нижнем роторе и 8.2 градуса на верхнем. Эти значения на 0.7-0.8 градуса ниже ожидаемых нами значений дифферента (9.0 градуса на верхнем роторе и 9.9 градуса на нижнем роторе). Но эти значения были получены на основе испытаний без ветра и при несколько иной комбинации плотности атмосферы / скорости ротора, так что эта разница не является неожиданной. Еще одним признаком того, что мы находимся в нашей зоне аэродинамического комфорта, является мощность электрического ротора около 210 Вт в режиме зависания, что также близко к ожидаемой. Взятые вместе, результаты показывают, что у нас есть хороший запас против «аэродинамического срыва», когда угол аэродинамического профиля лопасти относительно окружающего воздушного потока увеличивается до точки, после которой уже не может увеличиваться подъемная сила.
Мы также оцениваем «циклическое» управление, которое используется для создания моментов крена и тангажа. Мы наблюдали относительно стабильные значения при зависании, с величиной менее 3 градусов, что оставляет достаточный запас по сравнению с верхним пределом в 10 градусов. Данные «циклического» управления довольно много говорят нам о ветре, с которым приходится бороться аппарату. Например, для первого полёта циклическое управление соответствовало ветрам с востока и юго-востока, что подтверждало наблюдения MEDA. Усилия по «циклическому» управлению также увеличиваются с высотой, что указывает на усиление ветра при удалении от земли.
На фазах зависания мы пытаемся поддерживать постоянную высоту, курс и положение. При оценке того, насколько хорошо нам удается этого добиться, мы вынуждены по большей части полагаться на собственные оценки Ingenuity того, что он делал, поскольку количество данных для установления «истины» у нас ограниченно. Эти оценки подвержены ошибкам в навигации, о которых будет рассказано в отдельном посте. Но стабильность этих оценок говорит нам о том, насколько точно контроллер может удерживать требуемые значения. Данные показывают, что мы очень хорошо удерживаем высоту в режиме зависания, примерно с точностью до 1 см. Мы также удерживаем курс (в заданном направлении) с точностью менее 1.5 градусов. Для горизонтального положения мы наблюдали смещения примерно до 25 см. Такие колебания ожидаются в результате порывов ветра.
А какой был ветер во время наших полетов? К счастью для нас, марсоход Perseverance имеет метеостанцию MEDA. Для первого полёта у нас есть измерения от MEDA, указывающие на скорость ветра 4-6 метров в секунду с востока и юго-востока в течение большей части полета с порывами до 8 метров в секунду. Имейте в виду, что эти измерения производятся на высоте 1.5 метра над уровнем земли, и существует тенденция к усилению ветра по мере того, как вы поднимаетесь с уровня земли вверх. У нас также есть измерения плотности атмосферы во время первого полета, показывающие 0.0165 килограмма на кубический метр, или около 1.3% плотности атмосферы Земли на уровне моря. Используя эту информацию, мы можем оценить производительность системы в другом важном аспекте, а именно, в требованиях к управлению, необходимых для полета.
Что касается «общего» управления (это то, которое равномерно изменяет угол наклона лопастей несущего винта, чтобы повлиять на тягу вертолета), мы хотели бы видеть значения зависания, примерно соответствующие нашим ожиданиям. Во время первого полета мы зависали с углом около 9.2 градуса на нижнем роторе и 8.2 градуса на верхнем. Эти значения на 0.7-0.8 градуса ниже ожидаемых нами значений дифферента (9.0 градуса на верхнем роторе и 9.9 градуса на нижнем роторе). Но эти значения были получены на основе испытаний без ветра и при несколько иной комбинации плотности атмосферы / скорости ротора, так что эта разница не является неожиданной. Еще одним признаком того, что мы находимся в нашей зоне аэродинамического комфорта, является мощность электрического ротора около 210 Вт в режиме зависания, что также близко к ожидаемой. Взятые вместе, результаты показывают, что у нас есть хороший запас против «аэродинамического срыва», когда угол аэродинамического профиля лопасти относительно окружающего воздушного потока увеличивается до точки, после которой уже не может увеличиваться подъемная сила.
Мы также оцениваем «циклическое» управление, которое используется для создания моментов крена и тангажа. Мы наблюдали относительно стабильные значения при зависании, с величиной менее 3 градусов, что оставляет достаточный запас по сравнению с верхним пределом в 10 градусов. Данные «циклического» управления довольно много говорят нам о ветре, с которым приходится бороться аппарату. Например, для первого полёта циклическое управление соответствовало ветрам с востока и юго-востока, что подтверждало наблюдения MEDA. Усилия по «циклическому» управлению также увеличиваются с высотой, что указывает на усиление ветра при удалении от земли.
M[
Посадка.
Посадка – самая сложная часть любого полета. Ingenuity приземляется, летя прямо в землю и обнаруживая, когда происходит касание поверхности, но перед приземлением очень быстро происходит несколько событий. Сначала устанавливается устойчивая скорость спуска 1 метр в секунду. Затем, когда аппарат оценивает, что ноги находятся в пределах 1 метра от земли, алгоритмы перестают использовать навигационную камеру и высотомер для оценки, полагаясь только на IMU так же, как и при взлете. Как и при взлете, это позволяет избежать помех от поднимаемой пыли, но также служит другой цели - полагаясь только на IMU, мы ожидаем очень плавной и непрерывной оценки нашей вертикальной скорости, что важно для предотвращения преждевременного обнаружения приземления.
Примерно через полсекунды после переключения в режим «только IMU», когда ноги находятся в пределах 0.5 метра от земли, активируется обнаружение приземления. Теперь Ingenuity будет считать, что приземление произошло, как только скорость снижения упадет на 25 сантиметров в секунду или более. Как только Ingenuity встречается с землей, скорость снижения резко падает. В этот момент система управления полетом прекращает попытки управлять движением вертолета и передает команду «общему» управлению установку минимально возможного шага лопастей, чтобы создать тягу, близкую к нулю. Затем система ждет 3 секунды, чтобы убедиться, что вертолет действительно стоит на земле, прежде чем остановить винты.
Посадка – самая сложная часть любого полета. Ingenuity приземляется, летя прямо в землю и обнаруживая, когда происходит касание поверхности, но перед приземлением очень быстро происходит несколько событий. Сначала устанавливается устойчивая скорость спуска 1 метр в секунду. Затем, когда аппарат оценивает, что ноги находятся в пределах 1 метра от земли, алгоритмы перестают использовать навигационную камеру и высотомер для оценки, полагаясь только на IMU так же, как и при взлете. Как и при взлете, это позволяет избежать помех от поднимаемой пыли, но также служит другой цели - полагаясь только на IMU, мы ожидаем очень плавной и непрерывной оценки нашей вертикальной скорости, что важно для предотвращения преждевременного обнаружения приземления.
Примерно через полсекунды после переключения в режим «только IMU», когда ноги находятся в пределах 0.5 метра от земли, активируется обнаружение приземления. Теперь Ingenuity будет считать, что приземление произошло, как только скорость снижения упадет на 25 сантиметров в секунду или более. Как только Ingenuity встречается с землей, скорость снижения резко падает. В этот момент система управления полетом прекращает попытки управлять движением вертолета и передает команду «общему» управлению установку минимально возможного шага лопастей, чтобы создать тягу, близкую к нулю. Затем система ждет 3 секунды, чтобы убедиться, что вертолет действительно стоит на земле, прежде чем остановить винты.
M[
Люди спрашивают, почему мы касаемся земли с относительно высокой скоростью 1 метр в секунду? Для этого есть несколько причин. Во-первых, это сокращает время, когда не используются камеры и высотомер; во-вторых, сокращается время, затрачиваемое на «эффект земли», когда аэродинамика аппарата не очень хорошо охарактеризована; в-третьих, это упрощает обнаружение того, что мы приземлились (изменения скорости более чем достаточно для обнаружения). Что делает эту стратегию возможной, так это конструкция шасси, которая помогает предотвратить подпрыгивание аппарата при посадке. Любой алгоритм обнаружения приземления подобного рода должен обеспечивать баланс между двумя потенциальными проблемами: 1) слишком раннее обнаружение приземления (в результате чего происходит падение на землю с воздуха) и 2) недостаточно быстрое обнаружение приземления (что может привести к смещению вертолета, который продолжает пытаться лететь после контакта с землей). Данные полетов Ingenuity на Марсе показывают, что ни один из этих сценариев нам не грозил. Во время снижения Ingenuity сохранял вертикальную скорость с точностью до 4 см в секунду и обнаруживал необходимое падение на 25 см в секунду в течение примерно 30 миллисекунд после приземления.
M[
Продолжая полеты на Марсе, мы продолжим изучать данные, чтобы понять различные тонкости, которые могут существовать и которые будут полезны при проектировании будущих воздушных исследователей. Но мы уже можем сказать: Ingenuity оправдал или превзошёл наши ожидания по летным характеристикам.
я всё 🤗
#многобукаф #Ingenuity
я всё 🤗
#многобукаф #Ingenuity
M[

блин, они до сих пор??? 😳
M[
они всё
Y
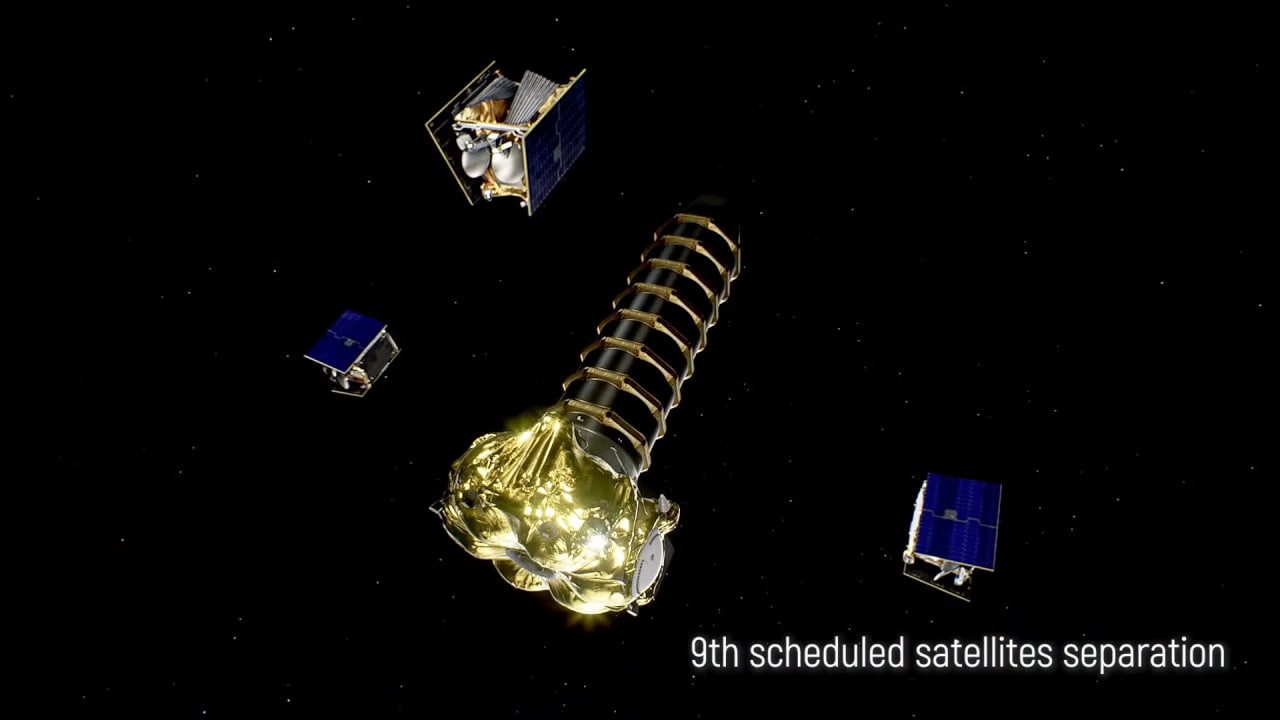
1545 запуск:
iv
👊🤝👍
iv
Круто и детально
Y

Всі супутники успішно виведені на орбіту...
VF

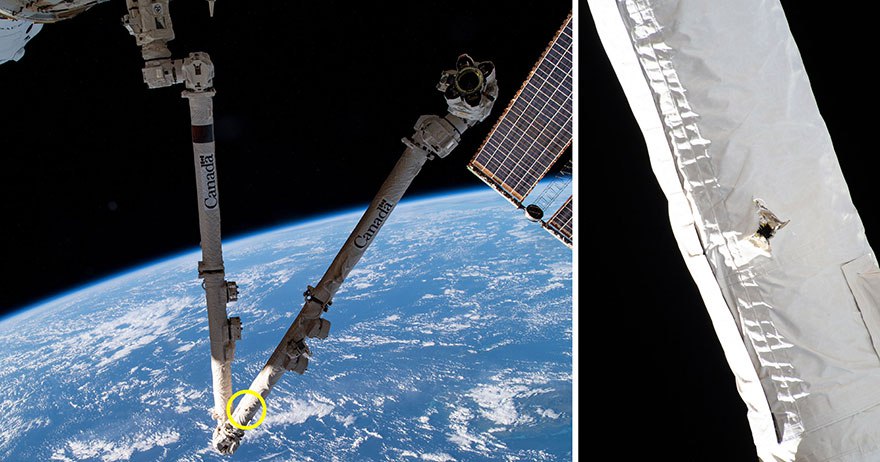
Очередной раз МКС "пронесло". На вылет пробило? 😳😱