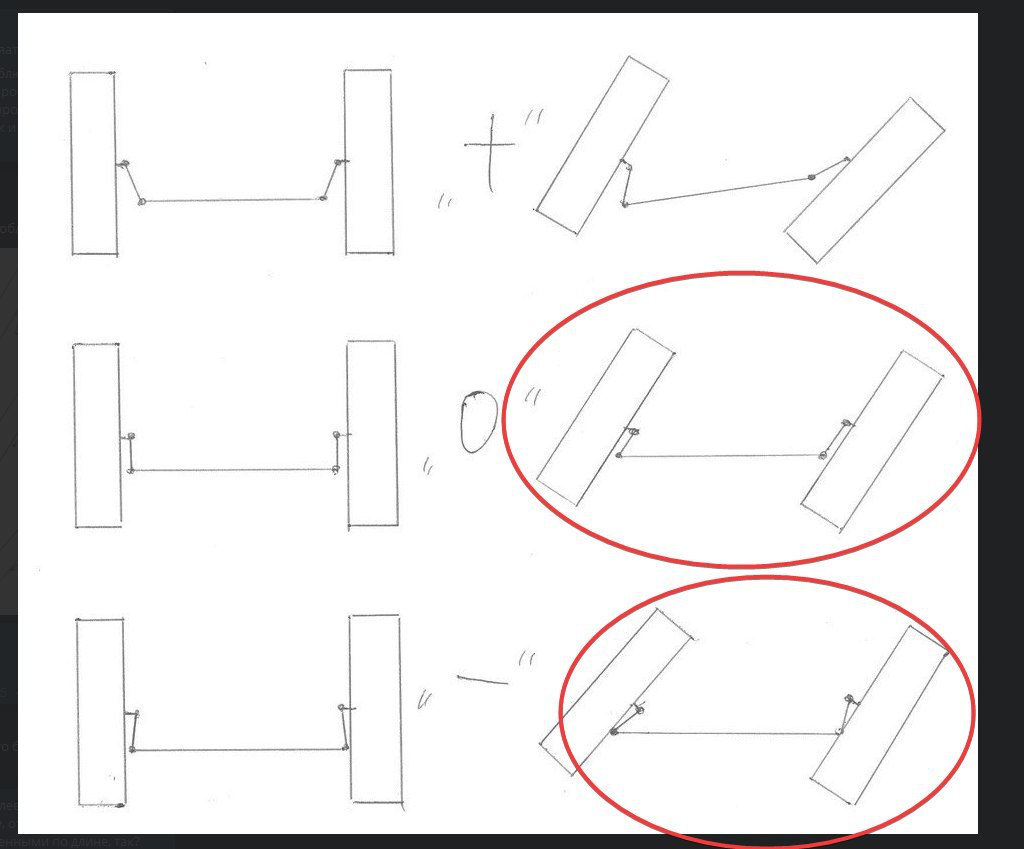
в итоге. Точки 2 и 5 зафиксируем по позиции XZ, оставив им только возможность вращаться. За основу управления всего механизма возьмем Левый рычаг (1,2,3), установим ось вращения в точке 2. Точки 3 и 4 привяжем между собой неизменным расстоянием. В таком случае, вращая ось 2 мы запустим механизм привязок и все заработает