projective geometric algebra
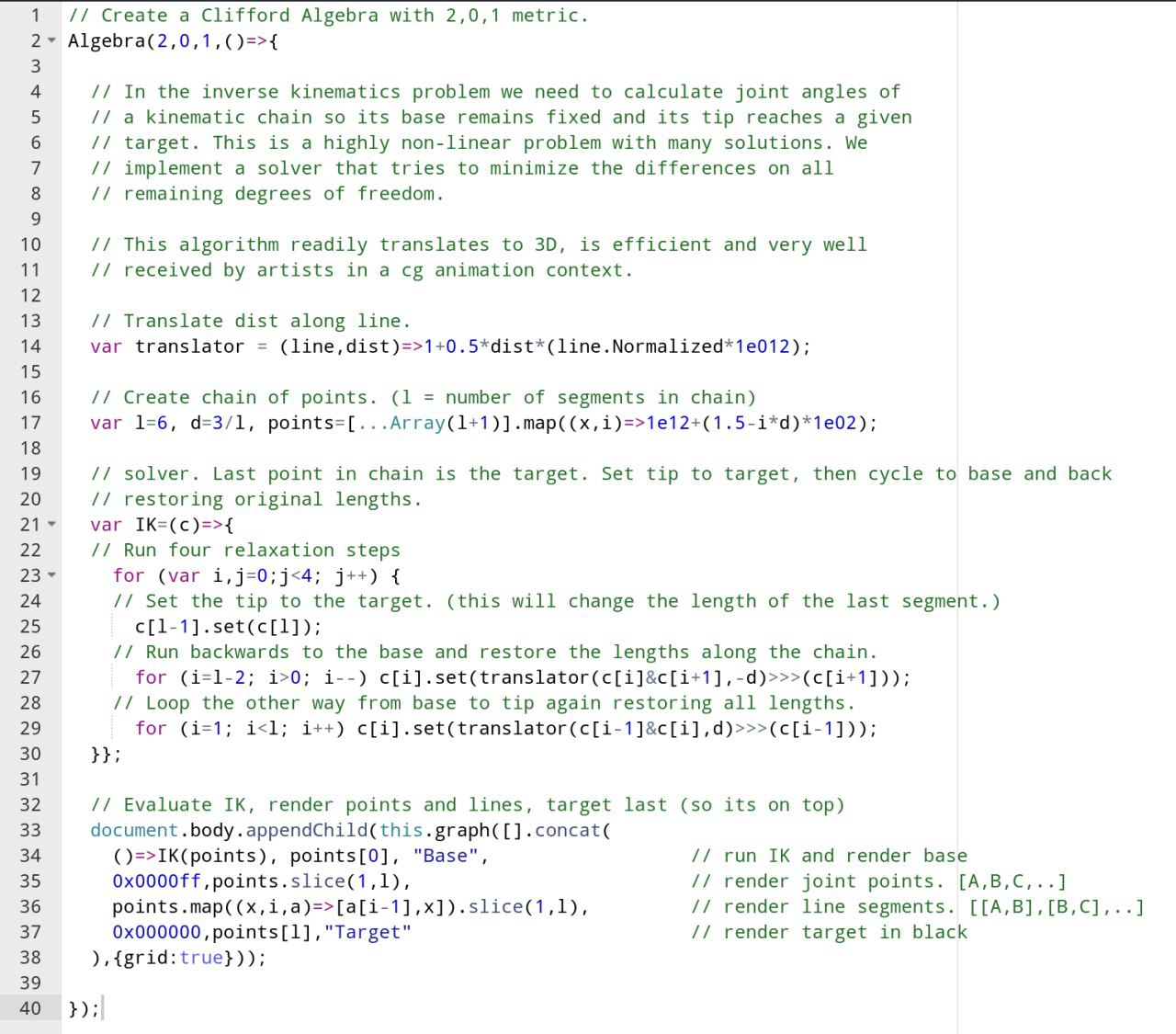
Тут роторы вместо кватернионов и моторы (лол, я знаю) вместо дуальных кватернионов. Плюс эти хуйни работают одинаково и в 2D и в 3D. Даже в 4D и выше, но оно хуй кому нужно. Так что можно написать например IK солвер, который будет идентичен по коду для обоих вариантов.
Нафиг. С конвертацией даты для разных sdk ещё потом дрочится. Выйгрыш в скорости не так велик, если это игра