AW
Опенсорсный манипулятор по-мексикански
Исследователи из Технологического института Монтеррея (Мексика) создали недорогой манипулятор с дистанционным управлением, который поможет улучшить обучение робототехнике в онлайн-формате.
«Этот проект предложили два студента во время вспышки COVID-19, когда всех переводили на дистанционное образование», — сказал один из разработчиков Виктор Бенитес.
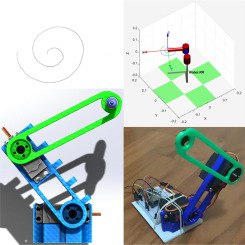
Роботизированная система состоит из четырех основных компонентов: электромеханической конструкции манипулятора робота, системы управления, модуля связи Wi-Fi и человеко-машинного интерфейса.
Возможности роборуки расширены за счёт «интернета вещей». IoT-интеграция достигается с помощью интерфейса HMI, реализованного через микроконтроллер ESP32 и управляемого со смартфона по Wi-Fi.
IoT-манипулятор предлагается использовать для демонстрации прямой и обратной кинематики путем программирования движений по методологии Денавита-Хартенберга (DH).
Основная цель проекта — предоставить недорогое и легко воспроизводимое устройство, помогающее освоить современные подходы в робототехнике посредством обучения на реальных примерах, воплощённых в железе.
Исходный код проекта полностью открыт как для аппаратной части, так и для программного обеспечение. Более того, ПО позволяет студентам получать доступ к каждой команде и каждому параметру, определяющим движения руки. Это способствует более глубокому пониманию процессов, лежащих в основе поведения робота.
Подробнее: HardwareX