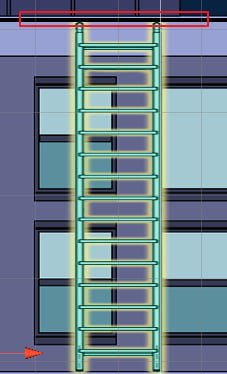
В общем у меня есть лестница,на ней есть платформа,по которой можно ходить. Бот может зайти на эту лестницу сверху,снизу или залететь по середине. В общем когда он заходит на лестницу,принимает решение например лезть вверх, что бы он корректно поднялся и остановился именно на данной платформе непокинув тригер лестницы(ибо когда он покидает тригер то сбрасываются решения). Ну в общем вся проблема в том что бы корректно остановить его на платформе и он мог пойти в бок, не начав спускаться вниз