م♡
Slam
Size: a a a
م♡
АС
DK
🎁
АС

АС
АС
D
d
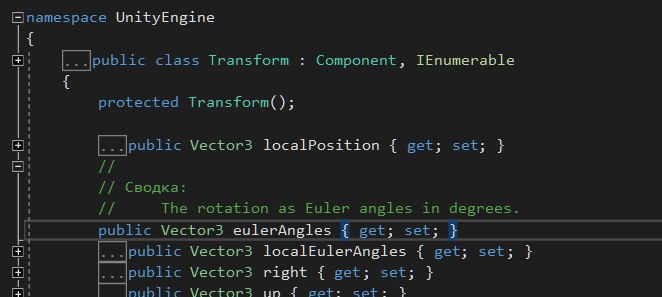
// The rotation as Euler angles in degrees.
public Vector3 eulerAngles { get { return rotation.eulerAngles; } set { rotation = Quaternion.Euler(value); } }
// The rotation as Euler angles in degrees relative to the parent transform's rotation.
public Vector3 localEulerAngles { get { return localRotation.eulerAngles; } set { localRotation = Quaternion.Euler(value); } }
D
// The rotation as Euler angles in degrees.
public Vector3 eulerAngles { get { return rotation.eulerAngles; } set { rotation = Quaternion.Euler(value); } }
// The rotation as Euler angles in degrees relative to the parent transform's rotation.
public Vector3 localEulerAngles { get { return localRotation.eulerAngles; } set { localRotation = Quaternion.Euler(value); } }
DK
d
public Vector3 eulerAngles
{
get { return Internal_MakePositive(Internal_ToEulerRad(this) * Mathf.Rad2Deg); }
set { this = Internal_FromEulerRad(value * Mathf.Deg2Rad); }
}
public static Quaternion Euler(float x, float y, float z) { return Internal_FromEulerRad(new Vector3(x, y, z) * Mathf.Deg2Rad); }
public static Quaternion Euler(Vector3 euler) { return Internal_FromEulerRad(euler * Mathf.Deg2Rad); }
П
RE
C
🎁
RE
🎁
RE