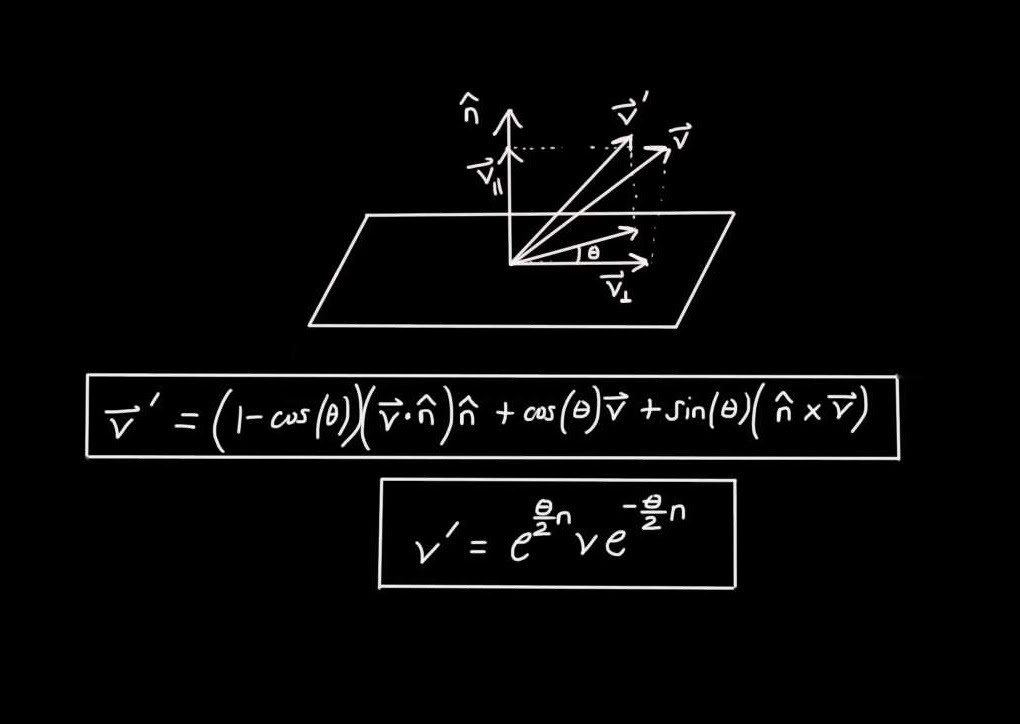
Если это вектора нааравлений то их недостаточно чтобы описать ориентацию
Например нужно одну 3х3 матрицу перевести в другую. В столбцах у них записаны базисы. Поочерёдно находим cross(i1, i2), cross(j1, j2), cross(k1, k2), считаем нужные синусы 1 раз для всех осей. По Родригису находим промежуточные положения базисов, которые записываем обратно в матрицу.